工業產品的表面缺陷對產品的美感、舒適性和性能都有負面影響,因此生產企業對產品的表面缺陷進行及時的缺陷進行檢測,機器視覺的檢測方法可以克服人工檢測采樣率低、精度低、實時性差、效率低、勞動強度高等缺點,在現代工業中得到越來越廣泛的研究和應用。
方法以機器視覺表面缺陷檢測為研究對象,在廣泛研究和發展成果的基礎上,綜述機器視覺在表面缺陷檢測領域的應用。分析了典型機器視覺表面缺陷檢測系統的工作原理和基本結構,闡述了表面缺陷視覺檢測的研究現狀、現有的視覺軟硬件平臺,總結了與機器視覺檢測相關的理論和算法,如圖像預處理算法、圖像分割算法、圖像特征提取和選擇算法、圖像識別算法等。總結了各主要方法的基本思想、特點和局限性,并對今后可能的發展方向進行了展望。
結果在機器視覺表面缺陷檢測系統中,圖像處理和分析算法是一個重要的組成部分,每種算法各有優缺點和自適應范圍,如何提高算法的準確性、實時性和魯棒性一直是研究人員努力的方向。結論機器視覺是人類視覺的仿真,機器視覺表面檢測涉及多個學科和理論,如何在自動化和智能化的方向進一步發展檢測,需要更深入的研究。
1、表面缺陷檢測
機器視覺技術是一種無接觸、無損傷的自動檢測技術,是實現設備自動化、智能化和精密控制的有效手段,具有安全可靠、光譜響應范圍寬、可在惡劣環境下長時間工作和生產效率高等突出優點。機器視覺檢測系統通過適當的光源和圖像傳感器(CCD攝像機)獲取產品的表面圖像,利用相應的圖像處理算法提取圖像的特征信息,然后根據特征信息進行表面缺陷的定位、識別、分級等判別和統計、存儲、查詢等操作;
2、機器視覺表面缺陷檢測系統基本組成
主要包括圖像獲取模塊、圖像處理模塊、圖像分析模塊、數據管理及人機接口模塊。
圖像獲取模塊由工業相機、光學鏡頭、光源及其夾持裝置等組成,其功能是完成產品表面圖像的采集。在光源的照明下,通過光學鏡頭將產品表面成像于相機傳感器上,光信號先轉換成電信號,進而轉換成計算機能處理的數字信號。目前工業用相機主要基于CCD或CMOS芯片的相機。CCD是目前機器視覺最為常用的圖像傳感器。
機器視覺光源直接影響到圖像的質量,其作用是克服環境光干擾,保證圖像的穩定性,獲得對比度盡可能高的圖像。目前常用的光源有鹵素燈、熒光燈和發光二級管(LED)。LED光源以體積小、功耗低、響應速度快、發光單色性好、可靠性高、光均勻穩定、易集成等優點獲得了廣泛的應用。
由光源構成的照明系統按其照射方法可分為明場照明與暗場照明、結構光照明與頻閃光照明。明場與暗場主要描述相機與光源的位置關系,明場照明指相機直接接收光源在目標上的反射光,一般相機與光源異側分布,這種方式便于安裝;暗場照明指相機間接接收光源在目標上的散射光,一般相機與光源同側分布,它的優點是能獲得高對比度的圖像。結構光照明是將光柵或線光源等投射到被測物上,根據它們產生的畸變,解調出被測物的3維信息。頻閃光照明是將高頻率的光脈沖照射到物體上,攝像機拍攝要求與光源同步。
圖像處理模塊主要涉及圖像去噪、圖像增強與復原、缺陷的檢測和目標分割。由于現場環境、CCD圖像光電轉換、傳輸電路及電子元件都會使圖像產生噪聲,這些噪聲降低了圖像的質量從而對圖像的處理和分析帶來不良影響,所以要對圖像進行預處理以去噪。圖像增強目的是針對給定圖像的應用場合,有目的地強調圖像的整體或局部特性,將原來不清晰的圖像變得清晰或強調某些感興趣的特征,擴大圖像中不同物體特征之間的差別,抑制不感興趣的特征,使之改善圖像質量、豐富信息量,加強圖像判讀和識別效果的圖像處理方法。圖像復原是通過計算機處理,對質量下降的圖像加以重建或復原的處理過程。圖像復原很多時候采用與圖像增強同樣的方法,但圖像增強的結果還需要下一階段來驗證;而圖像復原試圖利用退化過程的先驗知識,來恢復已被退化圖像的本來面目,如加性噪聲的消除、運動模糊的復原等。圖像分割的目的是把圖像中目標區域分割出來,以便進行下一步的處理。
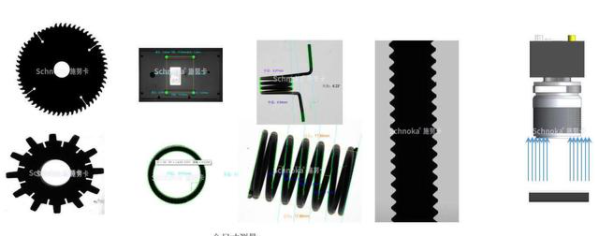
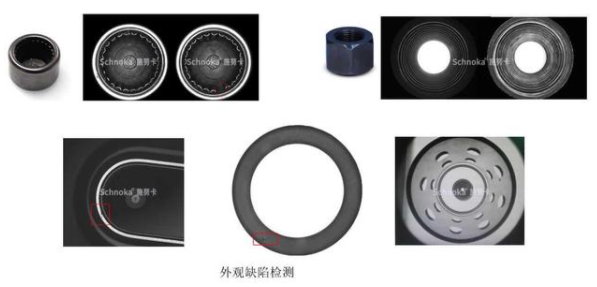
3、表面缺陷檢測應用
應用的領域十分的廣泛,主要包括鋼鐵冶金,有色金屬加工,高精銅板帶,鋁板帶,鋁箔,不銹鋼制造,電子素材,無紡布,織物,玻璃,紙張,薄膜等領域。
為什么要使用表面缺陷檢測系統呢?
保證產品質量,改善生產工藝,減少人工成本
線掃描表面缺陷檢測系統主要構成:
視覺采集部主要包括線陣相機,鏡頭,光源,圖像采集卡。
系統支架部分包括:相機支架,光源支架,和操作臺支架。
電氣部分(通信/控制部)包括編碼器,運動控制卡或者PLC,也有可能會有馬達等。
其他:各種電線電纜,CL線啊,電源線啊,各種SMPS啊,照明控制器啊等等。